








 TARJETA Sky293
TARJETA Sky293
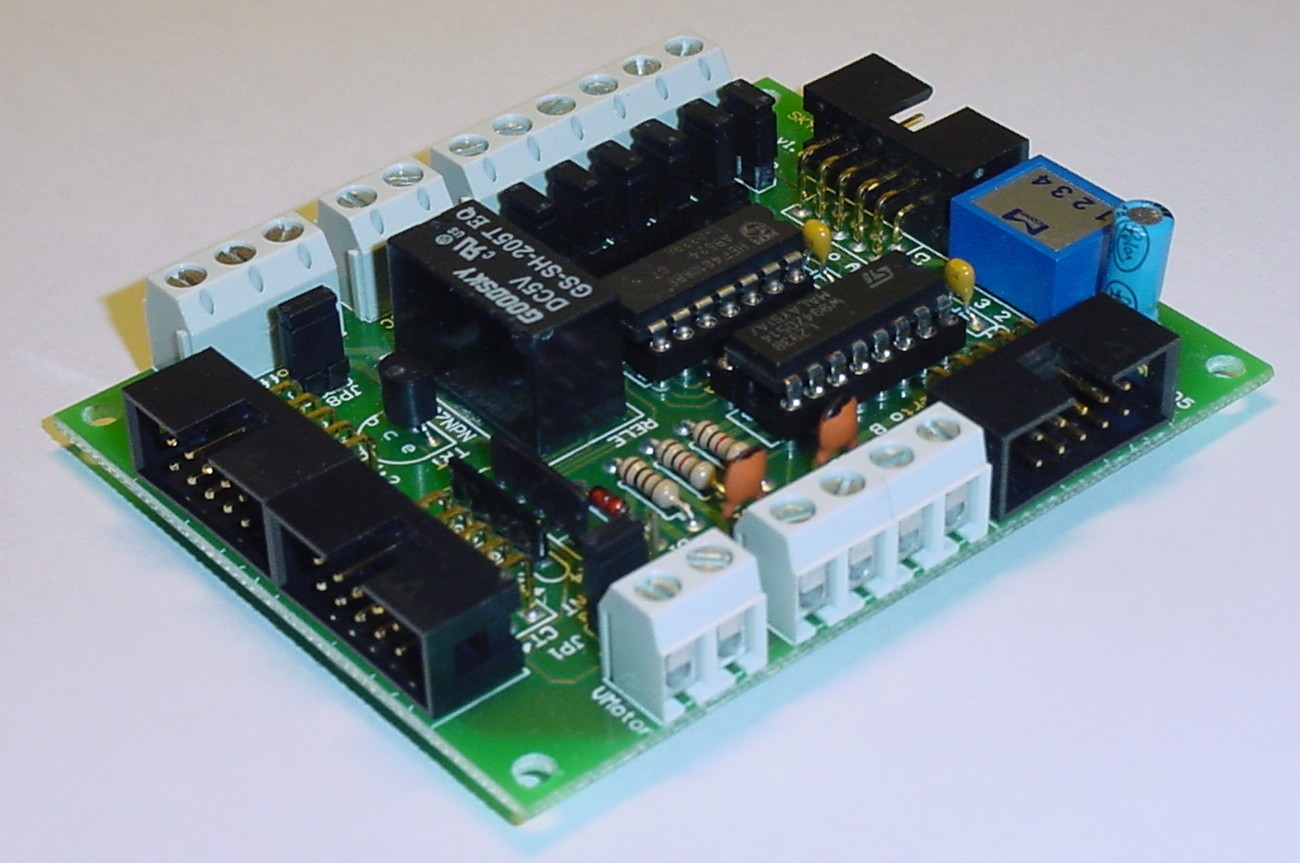
![sky293-desc[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/sky293-desc1.jpg "sky293-desc[1]") Introducción
Introducción
La tarjeta Sky293 proporciona la posibilidad de controlar motores, leer sensores y activar/desactivar un relé. Está diseñada para adaptarse perfectamente a la tarjeta SkyPic, aunque se puede usar con cualquier otro microcontrolador. La versión actual es la v1.0
En el Robot Skybot es la tarjeta que se encarga de mover los motores y de polarizar los sensores de entrada.
Características
- Posibilidad de control de dos motores de contínua o uno paso a paso. Se usa el chip L293B
- Capacidad para leer cuatro sensores de infrarrojos (CNY70), pudiendo ser optoacopladores
- Activar/Desactivar un relé
- Disponibilidad de 6 entradas digitales de propósito general con la posibilidad de usarlas con resitencias de pull-up que se pueden activar con sus respectivos jumpers
- Disponibilidad de 6 entradas analógicas compartidas con las entradas digitales y el relé
- Entrada de reloj externo para el Timer0
- Conexión de los elementos externos a través de clemas
- Alimentación independiente para los motores, o bien usando la misma que la electrónica
- Conexión directa a una tarjeta SkyPic, a través del puerto A y B
Disposición conectores
Puertos de expansión
La tarjeta Sky293 tiene dos puertos, denominados A y B, puesto que se pueden conectar directamente a los puertos A y B de la tarjeta SkyPic.
![puertos_expansion[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/puertos_expansion1.jpg "puertos_expansion[1]")
| PUERTO A | PUERTO B |
| PA1: Entrada analógica/digital 1 | PB1: Sentido de giro Motor 1 |
| PA2: Entrada analógica/digital 3 | PB2: Sentido de giro Motor 2 |
| PA3: Entrada analógica/digital 4 ó Relé | PB3: Estado sensor 2 |
| PA4: NC | PB4: Estado sensor 4 |
| PA5: Vcc | PB5: Vcc |
| PA6: GND | PB6: GND |
| PA7: NC | PB7: Estado sensor 3 |
| PA8: Input/Output ó TOCK | PB8: Motor 2, ON/OFF |
| PA9: Entrada analógica/digital 2 | PB9: Motor 1, ON/OFF |
| PA10: Entrada analógica/digital 0 | PB10: Estado sensor 1 |
Puertos de sensores
La tarjeta Sky293 tiene dos puertos, denominados Sensor 1:2 y Sensor 3:4, donde se conectarán los sensores CNY70.
.
![puertos_sensores[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/puertos_sensores1.jpg "puertos_sensores[1]")
| CT3 – SENSOR 1:2 | CT4 – SENSOR 3:4 |
| P1: Pin E (Sensor 1) | P1: Pin E (Sensor 3) |
| P2: Vcc – Pin C,A (Sensor 1) | P2: Vcc – Pin C,A (Sensor 3) |
| P3: Pin K (Sensor 1) | P3: Pin K (Sensor 3) |
| P4: Pin E (Sensor 2) | P4: Pin E (Sensor 4) |
| P5: Vcc – Pin C,A (Sensor 2) | P5: Vcc – Pin C,A (Sensor 2) |
| P6: Pin K (Sensor 2) | P6: Pin K (Sensor 4) |
| P7: Vcc – Pin C,A (Sensor 2) | P7: Vcc – Pin C,A (Sensor 4) |
| P8: Pin E (Sensor 2) | P8: Pin E (Sensor 4) |
| P9: Pin K (Sensor 1) | P9: Pin K (Sensor 3) |
| P10: Vcc – Pin C,A (Sensor 1) | P10: Vcc – Pin C,A (Sensor 3) |
Conexión sensores infrarrojos
![cny70-desc[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/cny70-desc1.jpg "cny70-desc[1]")
Descripción pines CNY70
La conexión de los sensores de infrarrojos de tipo CNY70 se realiza de cualquiera de las dos formas siguientes:
a) Usando un conector de 3 vias:
![cny70-con3[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/cny70-con31.jpg "cny70-con3[1]")
![conexion-cny[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/conexion-cny1.png "conexion-cny[1]")
b) Usando un cable plano de bus:
![cny70-con-bus[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/cny70-con-bus1.jpg "cny70-con-bus[1]")
Como podemos apreciar en la fotografía tenemos que poner la cara serigrafiada de los sensores mirando hacia arriba junto con la pestaña del conector para cable de bus.
NOTA: Los contactos del conector de bus pueden agrandarse con el uso y no hacer un buen contacto con los sensores, en ese caso habrá que hacer uso del cable con el conector de 3 vias o estañar las patas del sensor para darles un poco más de volumen.
Conexión motores
![conexion-motor[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/conexion-motor1.jpg "conexion-motor[1]")
Conexión bumpers
![bumpers[1]](http://www.pesadillo.com/pesadillo/wp-content/uploads/2009/10/bumpers1.jpg "bumpers[1]")
Conexión contactos relé
El relé funciona como un conmutador de dos posiciones, tiene tres patillas denotadas por N.C.(Normalmente cerrada), N.A.(Normalmente abierta) y la patilla común. El funcinamiento es el siguiente, cuando el relé está en reposo está cerrado el cicuito formado por las patillas común y N.C., cuando excitamos el relé se abre el circuito anterior y se cierra el formado por las patillas común y N.A.
Un relé se suele usar para controlar un circuito totalmente independiente. Por ejemplo, podemos pensar en usar la SKY293 para abrir una cerradura electrónica, para encender una lámpara, o para activar una electroválvula. En estos casos la alimentación de esos circuitos no coincide con los 5v de la SKY293, por eso no mezclaremos los circuitos. Tan solo insertaremos la entrada común y la entrada N.A. del relé en el circuito a controlar, para eso, a nivel práctico, trataremos esas entradas como si fuesen los extremos de un interruptor.
Alimentación
La Sky293 se alimenta con 5v, a través de los puertos de expansión (puerto A o Puerto B) o mediante la clema. La alimentación de los motores se puede hacer de forma independiente a través de una clema. En ese caso hay que poner el jumper JP1 en la posición 1-2.
Construcción cable de bus
Los cables de bus que usaremos para conectar la Sky293 con la tarjeta SkyPic serán rectos.

NOTA: Los cables que se usaban con la tarjeta ct293 NO SON VÁLIDOS ya que estos son cruzados.

…
Fuente: http://www.iearobotics.com/proyectos/sky293/sky293.html
|
|


 | 27 junio 2010 en Electronica | tags: Electronica |










{kind=link}
http://cadenas.partcommunity.com/PARTcommunity/Portal/cadenas
Crear PCB con acetato http://www.forosdeelectronica.com/f27/crear-pcb-partir-acetato-9265/